- 型号 & 关键词搜索
- 交叉搜索
- 参数搜索
- 库存查询与购买
This webpage doesn't work with Internet Explorer. Please use the latest version of Google Chrome, Microsoft Edge, Mozilla Firefox or Safari.
请输入3个以上字符 Search for multiple part numbers fromhere.
The information presented in this cross reference is based on TOSHIBA's selection criteria and should be treated as a suggestion only. Please carefully review the latest versions of all relevant information on the TOSHIBA products, including without limitation data sheets and validate all operating parameters of the TOSHIBA products to ensure that the suggested TOSHIBA products are truly compatible with your design and application.Please note that this cross reference is based on TOSHIBA's estimate of compatibility with other manufacturers' products, based on other manufacturers' published data, at the time the data was collected.TOSHIBA is not responsible for any incorrect or incomplete information. Information is subject to change at any time without notice.
请输入3个以上字符
使用MCU控制
超声电机的工作在很大程度上取决于其材料、形状、尺寸等。特别是电源电压值和相位应根据单个电机的特性进行调整。电机控制器需要高分辨率(微调)的一次性脉冲。
东芝将高分辨率PPG(可编程脉冲发生器)输出嵌入到微控制器(TX03系列M340组)中,为电源电压的微调控制提供了一个最佳解决方案。
高分辨率PPG(可编程脉冲发生器)输出
高分辨率PPG输出是由微控制器中的嵌入定时器所产生的一次性脉冲输出。频率和占空比的修正精度分辨率高达6.25ns。脉冲的前沿和后沿可分别选择上升和下降或者下降和上升。
一次性脉冲的第一个跃迁是前沿,
第二个跃迁是后沿。
每条边缘可以是上升边缘,也可以是后沿。
首先说明定时器的操作。
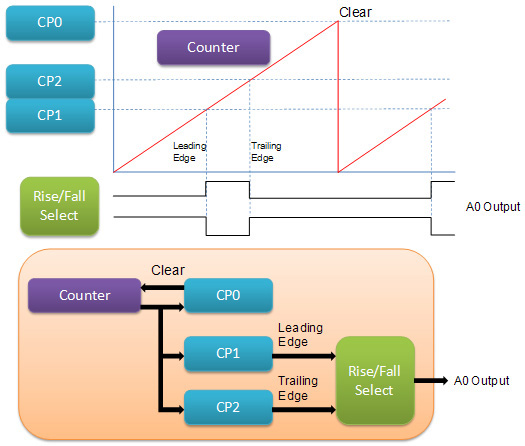
PPG电路中的定时器包括若干寄存器;周期寄存器CP0、前端定时寄存器CP1和尾端寄存器CP2。定时器中还有一个独立的计数器。当复位时,该计数器变为“0”,并按每个时钟递增。计数值将在每个时钟定时与CP0、CP1和CP2进行比较。
计数器从“0”开始并继续递增。当计数器的值等于CP1的值时,它将产生输出脉冲的前沿。前沿可以选择上升边缘或下降边缘。假设现在它是上升边缘,则在CP1值定时,输出从低电平变为高电平。
计数器继续递增,然后变为CP2的相同值。这时将出现后沿。这时边缘必须是下降边缘,因为前沿是上升边缘。输出从高电平转换到低电平。
计数器继续增加并成为CP0值,这会使计数器重置为“0”。计数器再次递增。
这一过程形成了周期CP0、上升边缘位于CP1和下降边缘位于CP2的一次性脉冲。递增时钟的最小周期为6.25ns,这是脉冲宽度的最小分辨率时间。
如果前沿设置为下降边缘,则后沿将自动成为上升边缘,并且最初输出为高电平,在前沿时间下降,在后沿时间上升。
现在,我们解释联锁PPG模式。
联锁模式是对脉冲进行微调的智能解决方案。
联锁PPG模式
东芝微控制器实现了两个具有高分辨率PPG输出的独立定时器。它产生两个不同的一次性脉冲并输出到不同的端子。
这两个定时器也可以在联锁操作中一起工作。
在这种模式下,虽然每个输出可能分别具有不同占空比,但周期必须相同。相位差可以选择-180°至+180°,精度的最小分辨率为6.25ns。
联锁模式的操作如下。
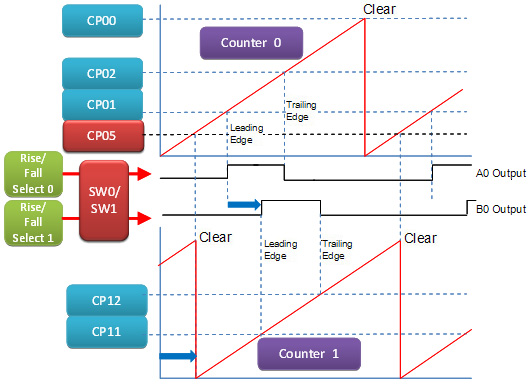
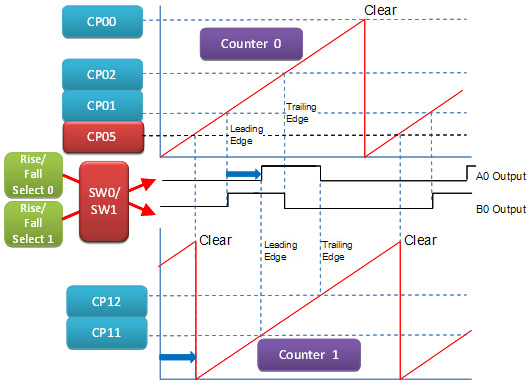
在这种模式下有两个定时器,一个称为定时器0,另一个称为定时器1,以此相互区分。定时器0周期寄存器CP00、前沿寄存器CP01和后沿寄存器CP02的工作方式与上述说明相同。脉冲的前沿和后沿也可以分别以相同的方式上升和下降或者下降和上升。
另一方面,定时器1的周期寄存器CP10被忽略。定时器1的周期由定时器0的周期寄存器CP00确定,以使得定时器0和1在同一周期内工作。各定时器的递增时钟相同,否则不能在联锁模式下工作。
定时器0和定时器1的前沿和后沿不仅可独立设置值,而且还可独立设置上升或下降边缘。

在联锁模式中引入了一个新的寄存器CP05。当定时器0的计数器变为CP05值时,寄存器的功能是保持一个值以重置定时器1的计数器。
让我们看一下当寄存器中的值具有以下条件时,在联锁模式下端子会发出什么样的脉冲;
CP01=CP11 < CP02=CP12 < CP00、CP05 < CP01
另一个条件是定时器0和定时器1的前沿和后沿分别为上升边缘和下降边缘。在这种情况下,输出A0和输出B0的波形具有相同的周期和相同的占空比,其相位差为CP05值。
(1)起始点应为定时器0的计数器CP00值。它使计数器重置。定时器1的计数器现在具有某个值(稍后将知道该值)。
(2)两个计数器同步递增。定时器0的计数器变为CP05,然后定时器1的计数器重置。
(3)计数器继续递增,定时器0的计数器变为CP01。输出A0从低电平上升到高电平。输出B0仍为低电平。
(4)接下来,当定时器1的计数器变为CP11时,输出B0上升。输出A0保持高水平。
(5)定时器0的计数器变为CP02,输出A0下降。
(6)接下来,当定时器1的计数器变为CP12时,输出B0下降。
(7)然后,继续递增,当定时器0的计数器变为C00时,计数器重置,并返回至(1)。此时定时器1的计数器为(CP00-CP05)的值。
它现在返回至(1)。然后重复到(7)。
CP05在联锁PPG模式下很重要。如上所述,定时器1总是比定时器0落后CP05的值。如果CP05的值改变,则输出0和输出1之间的相位将移动该改变值。这种相位差的最小分辨率为6.25ns。
另一方面,如果输出1将在输出0之前,则定时器0生成的一次性脉冲将被传输到输出1,定时器1生成的一次性脉冲将被传输到输出0。也就是说,定时器操作保持不变,输出0和1完成交换。这将导致输出1比输出0提前CP05。
用角度表达式描述相位差时,
(C05÷C00)×360°
可以作为计算公式。
CP05最多可以是CP00的一半。
相位差可以选择-180°至+180°,但实际选择的值是-90°至+90°。
这说来话长,但我希望您能很好地理解联锁PPG模式及其机制。
电路结构很简单,不是吗?
下面,让我们看一下由微控制器控制的超声电机的演示视频。