- 型号 & 关键词搜索
- 交叉搜索
- 参数搜索
- 库存查询与购买
This webpage doesn't work with Internet Explorer. Please use the latest version of Google Chrome, Microsoft Edge, Mozilla Firefox or Safari.
请输入3个以上字符 Search for multiple part numbers fromhere.
The information presented in this cross reference is based on TOSHIBA's selection criteria and should be treated as a suggestion only. Please carefully review the latest versions of all relevant information on the TOSHIBA products, including without limitation data sheets and validate all operating parameters of the TOSHIBA products to ensure that the suggested TOSHIBA products are truly compatible with your design and application.Please note that this cross reference is based on TOSHIBA's estimate of compatibility with other manufacturers' products, based on other manufacturers' published data, at the time the data was collected.TOSHIBA is not responsible for any incorrect or incomplete information. Information is subject to change at any time without notice.
请输入3个以上字符
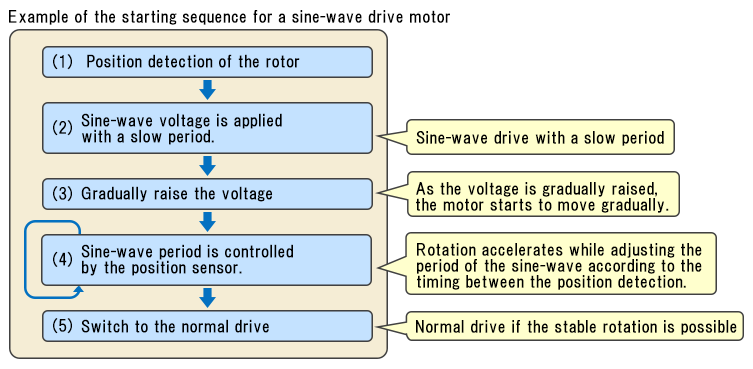
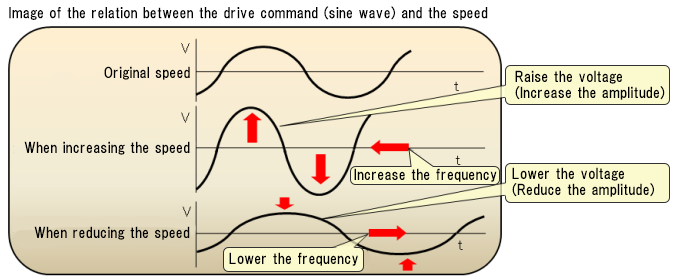
从方波驱动开始
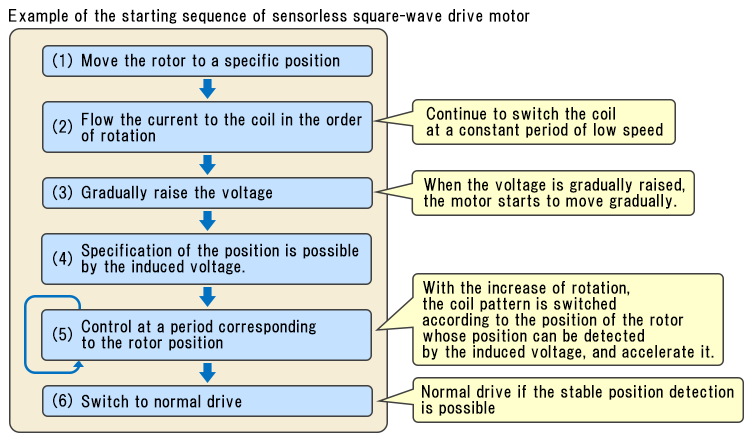
在无传感器方波驱动的情况下,启动时不会产生感应电动势,无法识别转子位置。
因此,需要执行以下操作。
- (1)首先,强行使电流流向指定线圈,使转子移动到指定位置。
- (2)使电流在低电压和恒定周期的线圈中流动。
- (3)在逐渐增加电压的同时旋转转子。
- (4)增加转数,转子位置可以通过感应电压检测。
- (5)使电流流向检测到的转子位置所对应的线圈。
- (6)如果能检测到稳定的位置,则开始稳定运行以达到目标速度。
在稳定运行状态,通过反馈目标速度偏差,可以保持速度不受负载波动的影响。
* 当强行移动到指定位置时,可能会因停止位置而瞬间反转。