

- 型号 & 关键词搜索
- 交叉搜索
- 参数搜索
- 库存查询与购买
This webpage doesn't work with Internet Explorer. Please use the latest version of Google Chrome, Microsoft Edge, Mozilla Firefox or Safari.
请输入3个以上字符 Search for multiple part numbers fromhere.
The information presented in this cross reference is based on TOSHIBA's selection criteria and should be treated as a suggestion only. Please carefully review the latest versions of all relevant information on the TOSHIBA products, including without limitation data sheets and validate all operating parameters of the TOSHIBA products to ensure that the suggested TOSHIBA products are truly compatible with your design and application.Please note that this cross reference is based on TOSHIBA's estimate of compatibility with other manufacturers' products, based on other manufacturers' published data, at the time the data was collected.TOSHIBA is not responsible for any incorrect or incomplete information. Information is subject to change at any time without notice.
请输入3个以上字符
微步技术
全步驱动可以打开和关闭两个绕组的电流,并以固定角度旋转它们,而微步驱动可以通过逐步改变两个绕组的电流比,以比基本步距角更精细的步距角旋转它们。
范围是1/4,1/8,1/16,1/32和1/64(步)。
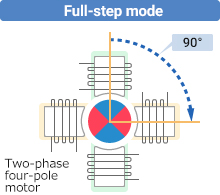
全步模式
步距角是360度除以总极数。
若是四极,360度/4=90度。
假设是一个36极电机,360度/36=10度,全步进模式的单步运行角度为10度。
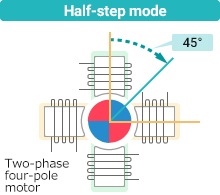
半步模式
半步模式的一个步距角是全步模式的1/2。
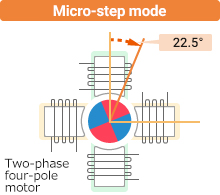
微步模式
微步模式的一个步距角可以选择为全步模式的1/4和更精细的步距角。
(举例:1/4)