
2019年04月22日
东芝电子元件及存储装置株式会社
东京—东芝电子元件及存储装置株式会社已开发出一种算法,该算法可把东芝集团目前汽车激光雷达[2]的角分辨率提高一倍[1],实现了远距离物体测量和高质量3D图像。[3][4]该技术的详细信息已于4月19日在横滨举行的酷芯片22次会议上予以公布。
激光雷达系统采用基于激光的光探测和测距技术来探测附近的车辆和行人,是更为先进的驾驶辅助系统和自动驾驶车辆的关键技术。为了达到真正的效果,它们必须提供远程距离测量和高的角分辨率。
在强光条件下的远距离精确测量对于激光雷达而言是一个特别大的难题,因为环境条件会产生大量的噪声。由于自主驾驶系统需要检测车辆前方距离内的摩托车和小型物体,所以激光雷达系统必须提供高的角分辨率能力。
虽然使用多个像素数据的平均算法可以抑制噪声,但它们也会降低像素分辨率,并且可以从随机噪声中生成虚假数据,当可测量距离内没有对象时,将会发生这种情况。
东芝公司开发了智能积累技术(SAT)作为一种远程测量解决方案,这项技术业已发表于ISSC2018[3]。SAT将利用信号强度和背景光信息识别和选择性地积累目标反射数据,保证了大量噪声下的精确测量。在此基础上,东芝电子元件及存储装置株式会社在酷芯片21[4]次会议上提出了一种根据可靠度准则进行多个回波之间去噪和选择合适数据的算法。该解决方案解决了范围值聚类、平均值副作用等问题,实现的远程测量中的虚假数据点很少。
即便使用这些技术,仍然需要提高水平方向上的像素质量和角分辨率,为此东芝电子元件及存储装置株式会社开发了“帧间智能积累技术(I-SAT)”。
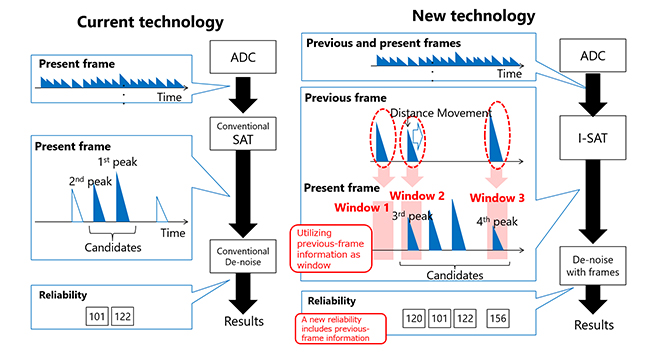
传统的平均值方法仅使用当前图像帧内的模数转换器(ADC)结果,但若将其与之前帧的信息一起使用将会获得更好的性能。但是从当前帧和之前帧中积累ADC结果存在两个问题:一是依赖旧的结果可能会在目标移动时返回不正确的测量值;二是该算法需要大量的内存资源来保存之前帧的所有ADC结果。
I-SAT将通过保存距离结果而不是ADC结果来解决问题。它将根据之前帧中测量的距离和运动来定义搜索窗口,并从当前帧窗口检测到的回波(峰值)中选择额外的输出候选项,间接利用前一帧信息。当前SAT将在当前帧的积累结果中选择两个最大峰值以作为输出候选项。I-SAT将根据之前的帧数据确定搜索窗口,并添加窗口中检测到的更多候选项、第三个和第四个峰值。如果窗口中没有峰值,则对测量没有影响。在候选项中,I-SAT将根据新的可靠度等级选择峰值,该可靠度等级将被扩展以包含前一帧的信息。
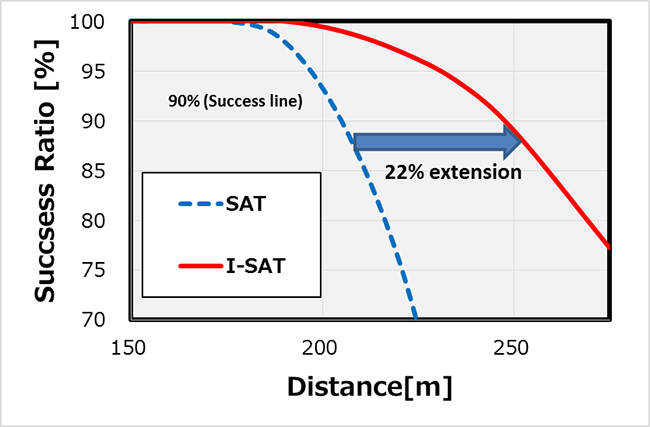
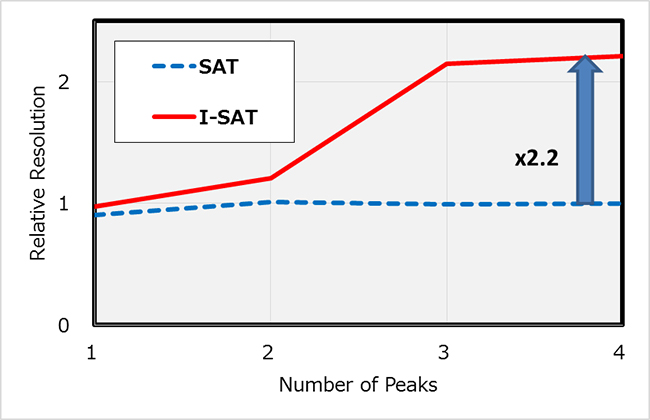
这种新的方法比东芝集团的现有技术提高了超过2×(2.2×)的长距离分辨率,并在200m的距离内实现了0.1度分辨率。[3][4] 在与东芝集团目前技术具有相同分辨率的前提下,它将可测量距离提高了22%。[3][4]其额外的硬件需求非常小;必须增加的存储器大小不到1%[5]。东芝电子元件及存储装置株式会社将继续研究提高测距精度,期望在2020财政年度前建立一项实用技术。
东芝电子元件及存储装置株式会社还开发了用于激光雷达系统的硅光电倍增器(SiPM),高灵敏度集成光学传感器。公司将继续推进自动驾驶系统的研发工作,致力于提供车载半导体解决方案,进一步推进安全驾驶。
注
[1] 基于东芝电子元件及存储装置株式会社在2019年3月实施的仿真试验(成功:距离误差≦1%的距离值,目标反射率:10%,环境光强度:100K勒克斯)
[2] LiDAR:光探测和测距
[3] 东芝公司发表于2018 ISSCC(国际固态电路会议)的技术(论文标题:采用智能积累技术的200米距离成像激光雷达(240×96像素,10%反射,<0.125%精度)的20通道TDC/ADC混合SoC)
[4] 东芝电子元件及存储装置株式会社发表于酷芯片21会议的技术(论文标题:基于长距离高像素分辨率激光雷达可靠性的数据选择与去噪),东芝集团目前的技术包括这两种技术。
[5] 基于东芝电子元件及存储装置株式会社在2019年3月实施的仿真试验(分辨率:450×178×20fps;生产工艺:28纳米工艺技术)
与东芝集团现有技术比较
可测量距离的延长
相对分辨率与峰值数
* 公司名称、产品名称和服务名称可能是其各自公司的商标。